Neurobots
EMG controlled hexbug toy

Project Background
This project was a demo to show potential applications of OpenBCI technology to use EMG signalling to control a toy.
Hardware
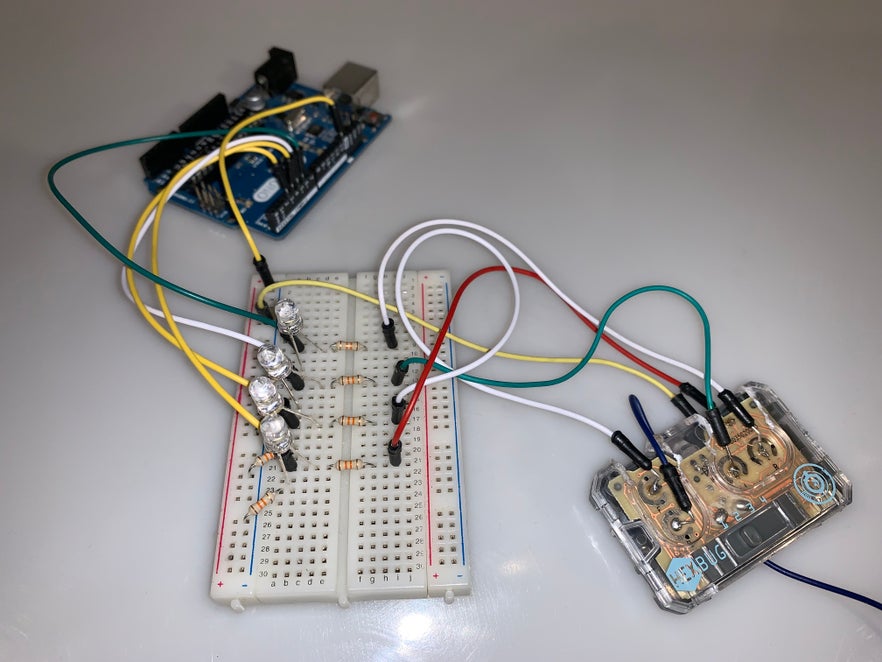
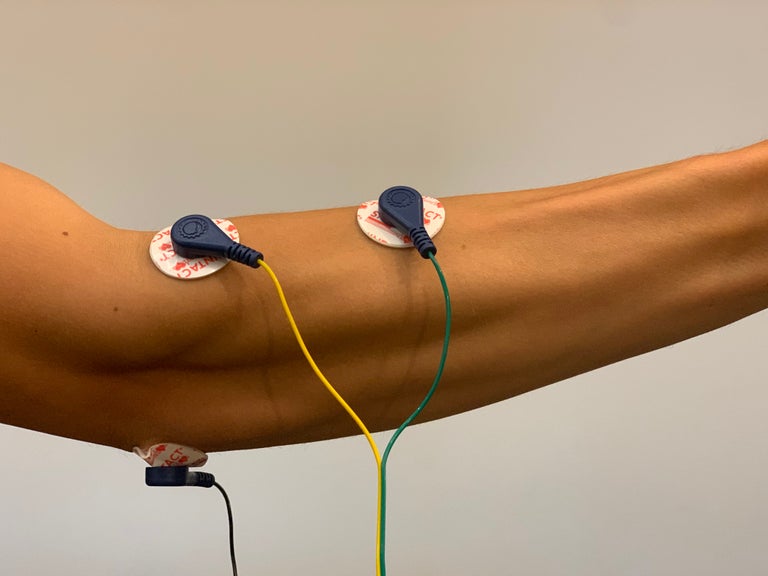
In order to access the board of the controller, we opened it up and soldered our own connections to create connections between tthe controller and our Arduino. From there, we connected the hardware to the OpenBCI cyton, and attached electrodes to ourselves to take EMG measurements
While the general process was intuitive, creating a hardware setup that could work reliably took numerous trials.
Software
I was largely responsible for writing the code for this project in Arduino. Due to the tempermental nature of the setup, this was a long process, and required making changes to the data outputs that the OpenBCI software sent to Arduino. We also had to select sensitivity thresholds to ensure that only intentional muscle contractions would be counted as "button pressing."

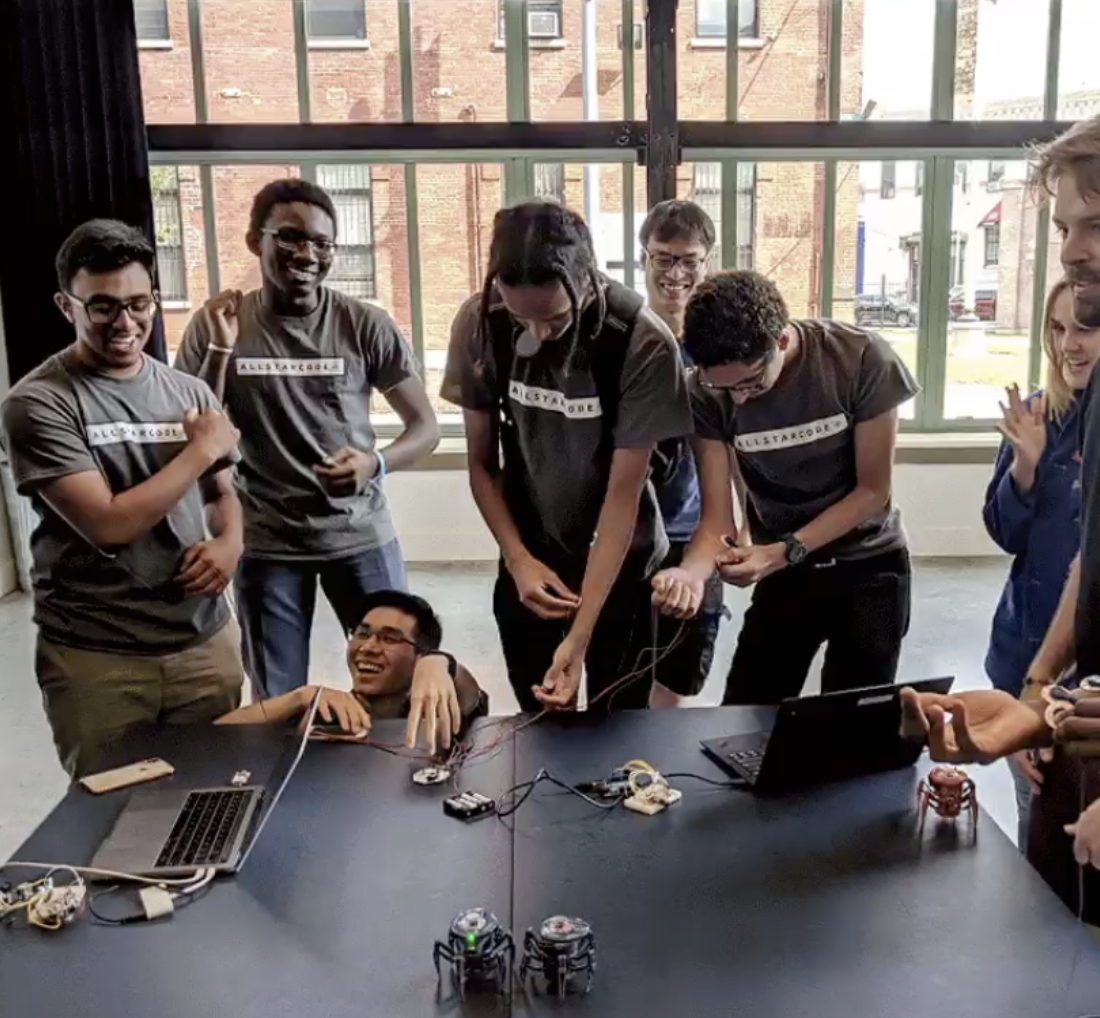
Working Game: Neurobots Battle Royale!
When the assembly was finally put together, the EMG signals from tensing my arms were able to be transmitted as left and right signals. With enough electrodes, this meant that we could play battle royale with the robots as you typically would with the remote control, but with our own biosignals!